US12638844 - Systems and methods of detecting intent of spatial control
This patent describes a method for detecting vehicle control intent by processing data to compute desired velocity vectors and aligning them with principal axis directions. The system aims to enhance the precision of robotic control in environments with variable sensor accuracy and dynamic conditions.
Claim 1
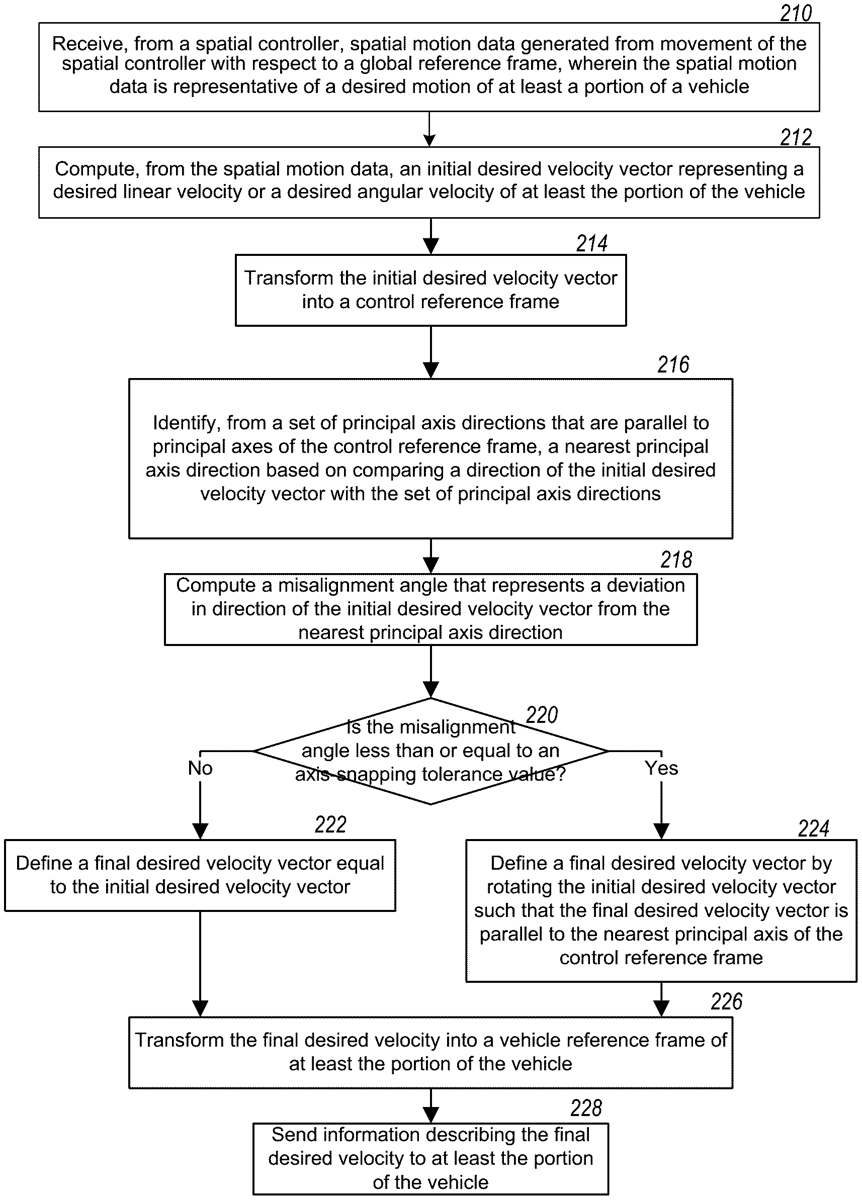
1 . A method of detecting an intent of vehicle control, the method comprising: receiving data representative of a desired motion of at least a portion of a vehicle; computing, from the data, an initial desired velocity vector representing a desired linear velocity or a desired angular velocity of at least the portion of the vehicle; identifying, from a set of principal axis directions that are parallel to principal axes, a nearest principal axis direction based on comparing a direction of the initial desired velocity vector with the set of principal axis directions; computing a misalignment angle that represents a deviation in the direction of the initial desired velocity vector from the nearest principal axis direction; upon determining that the misalignment angle matches an axis-snapping tolerance value, defining a final desired velocity vector by changing the initial desired velocity vector such that the final desired velocity vector is parallel to the nearest principal axis direction; and causing at least the portion of the vehicle to move according to the final desired velocity vector. receiving data representative of a desired motion of at least a portion of a vehicle; computing, from the data, an initial desired velocity vector representing a desired linear velocity or a desired angular velocity of at least the portion of the vehicle; identifying, from a set of principal axis directions that are parallel to principal axes, a nearest principal axis direction based on comparing a direction of the initial desired velocity vector with the set of principal axis directions; computing a misalignment angle that represents a deviation in the direction of the initial desired velocity vector from the nearest principal axis direction; upon determining that the misalignment angle matches an axis-snapping tolerance value, defining a final desired velocity vector by changing the initial desired velocity vector such that the final desired velocity vector is parallel to the nearest principal axis direction; and causing at least the portion of the vehicle to move according to the final desired velocity vector.
Google Patents
https://patents.google.com/patent/US12638844
USPTO PDF
https://image-ppubs.uspto.gov/dirsearch-public/print/downloadPdf/12638844