US12282340 - Counter drone system
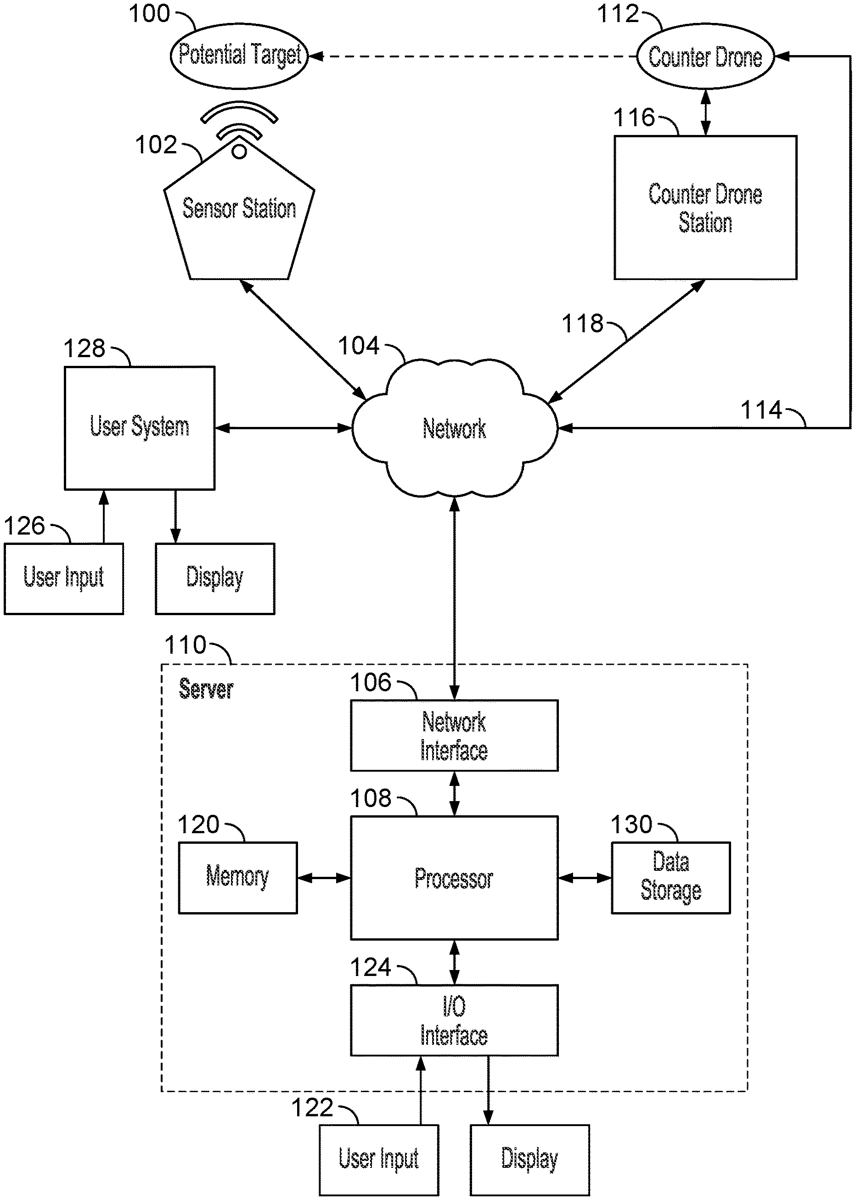
The patent describes a counter drone system that utilizes multiple sensor systems and a processor to identify and assess potential threat drones based on a fused data set. The system determines whether a target is a threat drone by analyzing various characteristics and probabilities, and it provides instructions to the counter drone only if a threat is confirmed.
Claim 1
- A system for countering a threat drone, comprising: a plurality of sensor systems, wherein a sensor system of the plurality of sensor systems comprises one or more sensors that are connected to a network; a counter drone, wherein the counter drone is connected to the network; and a processor configured to: receive an indication of a potential target from the plurality of sensor systems; generate a fused data set of the potential target, wherein the fused data set comprises the indication of the potential target and one or more of: another indication of the potential target, a raw sensor information, and/or a derived sensor information, wherein generating the fused data set comprises determining that the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information are all associated with the potential target and combining the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information, wherein the derived sensor, information is generated using the raw sensor information, and wherein the derived sensor information comprises an altitude, a position data, a location within a geo-fenced area, a target trajectory, a radar image, an infrared image, an optical image, a lidar image, a vibration profile, an RF profile, a sound profile, and/or an absence or a presence of an RF immunity beacon; determine that the potential target does not comprise the threat drone based at least in part on the fused data set, comprising to: determine that a characteristic of the potential target is not within a geofenced area; and in response to determining that the characteristic of the potential target is not within the geofenced area: determine that a trajectory of the potential target will take the potential target within the geofenced area; and in response to determining that the trajectory of the potential target will take the potential target within the geofenced area: determine a first probability that a potential target image matches a threat drone image, a second probability that a potential target vibration profile matches a threat drone vibration profile. and a third probability that a potential target sound profile matches a threat drone sound profile; determine a combined probability based on a combination of the first probability, the second probability, and the third probability; determine whether the combined probability is equal to or exceeds a threshold; and in response to determining that the combined probability is less than the threshold, determine that the potential target does not comprise the threat drone; and in response to determining that the potential target comprises does not comprise the threat drone, provide omit providing counter drone instructions to the counter drone. a plurality of sensor systems, wherein a sensor system of the plurality of sensor systems comprises one or more sensors that are connected to a network; a counter drone, wherein the counter drone is connected to the network; and a processor configured to: receive an indication of a potential target from the plurality of sensor systems; generate a fused data set of the potential target, wherein the fused data set comprises the indication of the potential target and one or more of: another indication of the potential target, a raw sensor information, and/or a derived sensor information, wherein generating the fused data set comprises determining that the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information are all associated with the potential target and combining the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information, wherein the derived sensor, information is generated using the raw sensor information, and wherein the derived sensor information comprises an altitude, a position data, a location within a geo-fenced area, a target trajectory, a radar image, an infrared image, an optical image, a lidar image, a vibration profile, an RF profile, a sound profile, and/or an absence or a presence of an RF immunity beacon; determine that the potential target does not comprise the threat drone based at least in part on the fused data set, comprising to: determine that a characteristic of the potential target is not within a geofenced area; and in response to determining that the characteristic of the potential target is not within the geofenced area: determine that a trajectory of the potential target will take the potential target within the geofenced area; and in response to determining that the trajectory of the potential target will take the potential target within the geofenced area: determine a first probability that a potential target image matches a threat drone image, a second probability that a potential target vibration profile matches a threat drone vibration profile. and a third probability that a potential target sound profile matches a threat drone sound profile; determine a combined probability based on a combination of the first probability, the second probability, and the third probability; determine whether the combined probability is equal to or exceeds a threshold; and in response to determining that the combined probability is less than the threshold, determine that the potential target does not comprise the threat drone; and receive an indication of a potential target from the plurality of sensor systems; generate a fused data set of the potential target, wherein the fused data set comprises the indication of the potential target and one or more of: another indication of the potential target, a raw sensor information, and/or a derived sensor information, wherein generating the fused data set comprises determining that the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information are all associated with the potential target and combining the one or more of the another indication of the potential target, the raw sensor information, and/or the derived sensor information, wherein the derived sensor, information is generated using the raw sensor information, and wherein the derived sensor information comprises an altitude, a position data, a location within a geo-fenced area, a target trajectory, a radar image, an infrared image, an optical image, a lidar image, a vibration profile, an RF profile, a sound profile, and/or an absence or a presence of an RF immunity beacon; determine that the potential target does not comprise the threat drone based at least in part on the fused data set, comprising to: determine that a characteristic of the potential target is not within a geofenced area; and in response to determining that the characteristic of the potential target is not within the geofenced area: determine that a trajectory of the potential target will take the potential target within the geofenced area; and in response to determining that the trajectory of the potential target will take the potential target within the geofenced area: determine a first probability that a potential target image matches a threat drone image, a second probability that a potential target vibration profile matches a threat drone vibration profile. and a third probability that a potential target sound profile matches a threat drone sound profile; determine a combined probability based on a combination of the first probability, the second probability, and the third probability; determine whether the combined probability is equal to or exceeds a threshold; and in response to determining that the combined probability is less than the threshold, determine that the potential target does not comprise the threat drone; and determine that a characteristic of the potential target is not within a geofenced area; and in response to determining that the characteristic of the potential target is not within the geofenced area: determine that a trajectory of the potential target will take the potential target within the geofenced area; and in response to determining that the trajectory of the potential target will take the potential target within the geofenced area: determine a first probability that a potential target image matches a threat drone image, a second probability that a potential target vibration profile matches a threat drone vibration profile. and a third probability that a potential target sound profile matches a threat drone sound profile; determine a combined probability based on a combination of the first probability, the second probability, and the third probability; determine whether the combined probability is equal to or exceeds a threshold; and in response to determining that the combined probability is less than the threshold, determine that the potential target does not comprise the threat drone; and determine that a trajectory of the potential target will take the potential target within the geofenced area; and in response to determining that the trajectory of the potential target will take the potential target within the geofenced area: determine a first probability that a potential target image matches a threat drone image, a second probability that a potential target vibration profile matches a threat drone vibration profile. and a third probability that a potential target sound profile matches a threat drone sound profile; determine a combined probability based on a combination of the first probability, the second probability, and the third probability; determine whether the combined probability is equal to or exceeds a threshold; and in response to determining that the combined probability is less than the threshold, determine that the potential target does not comprise the threat drone; and in response to determining that the potential target comprises does not comprise the threat drone, provide omit providing counter drone instructions to the counter drone.
Google Patents
https://patents.google.com/patent/US12282340
USPTO PDF
https://image-ppubs.uspto.gov/dirsearch-public/print/downloadPdf/12282340