US12618975 - Targeting
The patent describes a method for accurately determining the position of a target by comparing bearings obtained through two independent techniques, such as a laser range finder and three-dimensional satellite cartography data. If the bearings are verified as accurate, the method further involves measuring the range to the target and calculating its precise location based on the verified data.
Claim 1
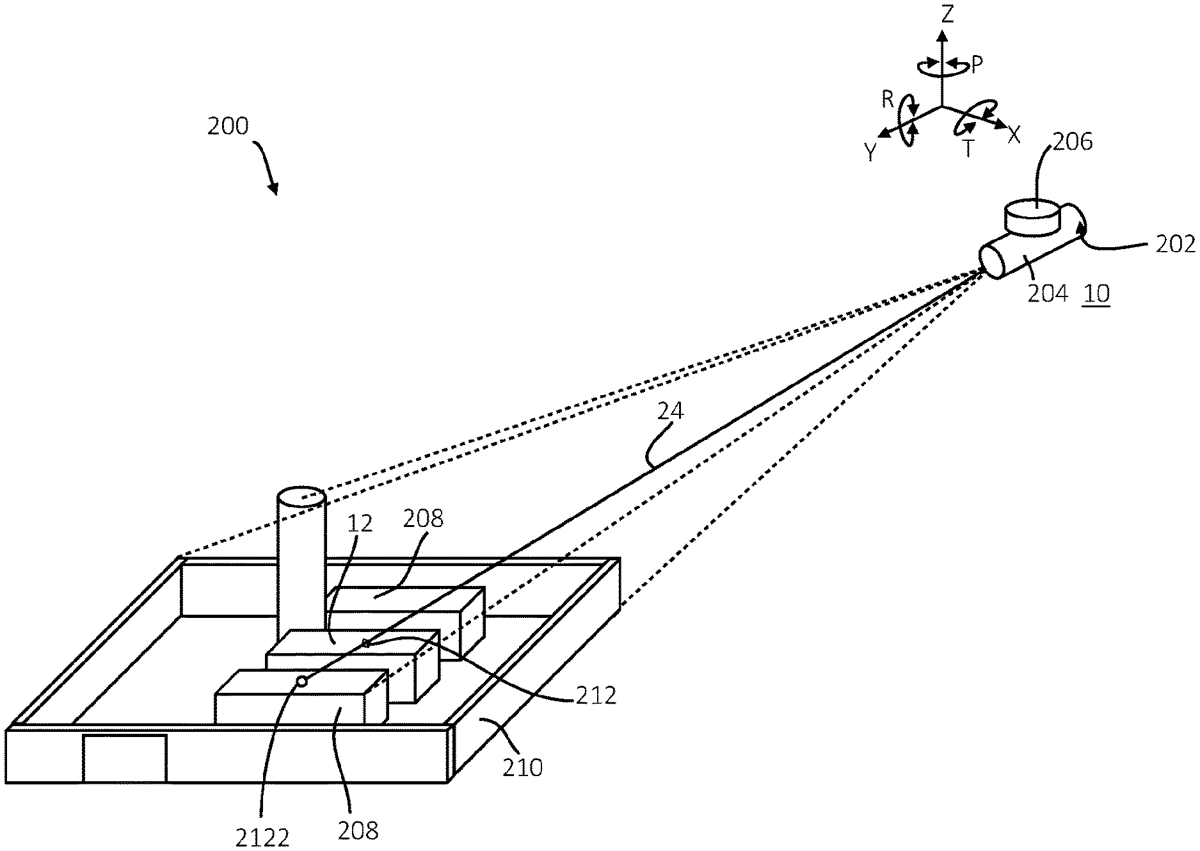
1 . A targeting method, comprising: determining a verified bearing to a target from an observer using first and second independent techniques to obtain a first bearing measurement and a second bearing measurement, respectively; comparing the first bearing measurement and the second bearing measurement as determined by the first and the second independent techniques to determine whether the verified bearing is accurate; and if the verified bearing is deemed to be accurate, measuring a range from the observer to the target; and calculating the position of the target based on the verified bearing and range from the observer’s position characterised by: obtaining the first bearing measurement by using a laser range finder comprising an image capture device and a compass or magnetometer to measure a bearing to three or more features within an image captured by the image capture device; obtaining the second bearing measurement by using three-dimensional satellite cartography data including elevation data to identify features in the three-dimensional satellite cartography data that correspond to the said three or more features in the image captured by the image capture device, calculating the position, pan/tilt and roll angles of the laser range finder based on the subtended angles between the three or more features within the captured image and checking that the bearing measurements correspond by comparing the first bearing measurement determined by using the laser range finder with the second bearing measurement calculated from the three-dimensional satellite cartography data, to check that the difference between the two sets of data is smaller than a predetermined value. determining a verified bearing to a target from an observer using first and second independent techniques to obtain a first bearing measurement and a second bearing measurement, respectively; comparing the first bearing measurement and the second bearing measurement as determined by the first and the second independent techniques to determine whether the verified bearing is accurate; and if the verified bearing is deemed to be accurate, measuring a range from the observer to the target; and calculating the position of the target based on the verified bearing and range from the observer’s position characterised by: obtaining the first bearing measurement by using a laser range finder comprising an image capture device and a compass or magnetometer to measure a bearing to three or more features within an image captured by the image capture device; obtaining the second bearing measurement by using three-dimensional satellite cartography data including elevation data to identify features in the three-dimensional satellite cartography data that correspond to the said three or more features in the image captured by the image capture device, calculating the position, pan/tilt and roll angles of the laser range finder based on the subtended angles between the three or more features within the captured image and checking that the bearing measurements correspond by comparing the first bearing measurement determined by using the laser range finder with the second bearing measurement calculated from the three-dimensional satellite cartography data, to check that the difference between the two sets of data is smaller than a predetermined value.
Google Patents
https://patents.google.com/patent/US12618975
USPTO PDF
https://image-ppubs.uspto.gov/dirsearch-public/print/downloadPdf/12618975