US12613082 - Method and system for intercepting and controlling target-drones
The patent describes a method and system for intercepting and controlling target-drones using police-drones that transmit redirection signals to guide the target-drones to a predetermined landing position without causing physical damage. The process involves determining the target-drone’s location, deploying a police-drone within a specific distance and altitude, and using spoofing signals to program a new flight route for the target-drone.
Claim 1
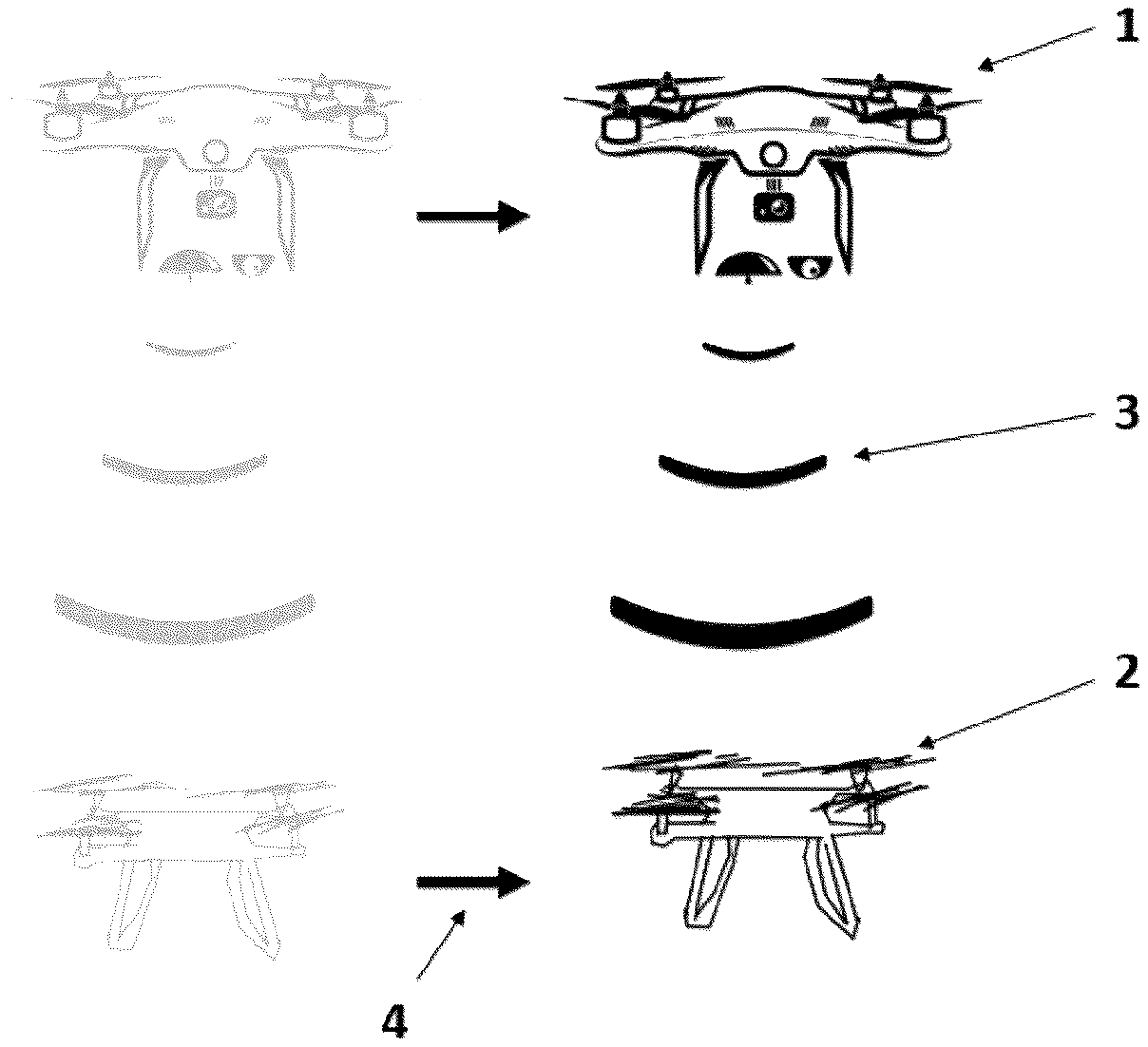
1 . A method for intercepting and controlling target-drones, the method comprising the following steps: i. determining the location in space of at least one target-drone that is positioned in a vicinity of or within a restricted area; ii. activating at least one police-drone and its displacement to an operating position in a vicinity of at least one target-drone; iii. transmitting redirection signals by at least one police-drone to the at least one target-drone; the redirection signals being configured to program a flight route for the at least one target-drone to a landing position; wherein, the redirection signals include spoofing signals, wherein the operating position is based on the location of a target-drone at any time; and the operating position being defined as a position for a police-drone that is at a radial distance between 3 to 10 meters from the target-drone, and wherein the operating position is defined as a position for the police-drone which is at an altitude higher than the altitude of the target-drone. i. determining the location in space of at least one target-drone that is positioned in a vicinity of or within a restricted area; ii. activating at least one police-drone and its displacement to an operating position in a vicinity of at least one target-drone; iii. transmitting redirection signals by at least one police-drone to the at least one target-drone; the redirection signals being configured to program a flight route for the at least one target-drone to a landing position; wherein, the redirection signals include spoofing signals, wherein the operating position is based on the location of a target-drone at any time; and the operating position being defined as a position for a police-drone that is at a radial distance between 3 to 10 meters from the target-drone, and wherein the operating position is defined as a position for the police-drone which is at an altitude higher than the altitude of the target-drone. wherein, the redirection signals include spoofing signals, wherein the operating position is based on the location of a target-drone at any time; and the operating position being defined as a position for a police-drone that is at a radial distance between 3 to 10 meters from the target-drone, and wherein the operating position is defined as a position for the police-drone which is at an altitude higher than the altitude of the target-drone.
Google Patents
https://patents.google.com/patent/US12613082
USPTO PDF
https://image-ppubs.uspto.gov/dirsearch-public/print/downloadPdf/12613082