US12578193 - Multi-IMU guidance measurement and control system with handshake capability to refine guidance control in response to changing conditions
This patent describes a guidance measurement and control system for projectiles or vehicles that utilizes multiple inertial measurement units (IMUs) to enhance location accuracy in environments where GPS is unreliable. The system features an electronics board with a processor that synchronizes IMU signals, corrects biases, and adjusts the projectile’s course based on real-time conditions.
Claim 1
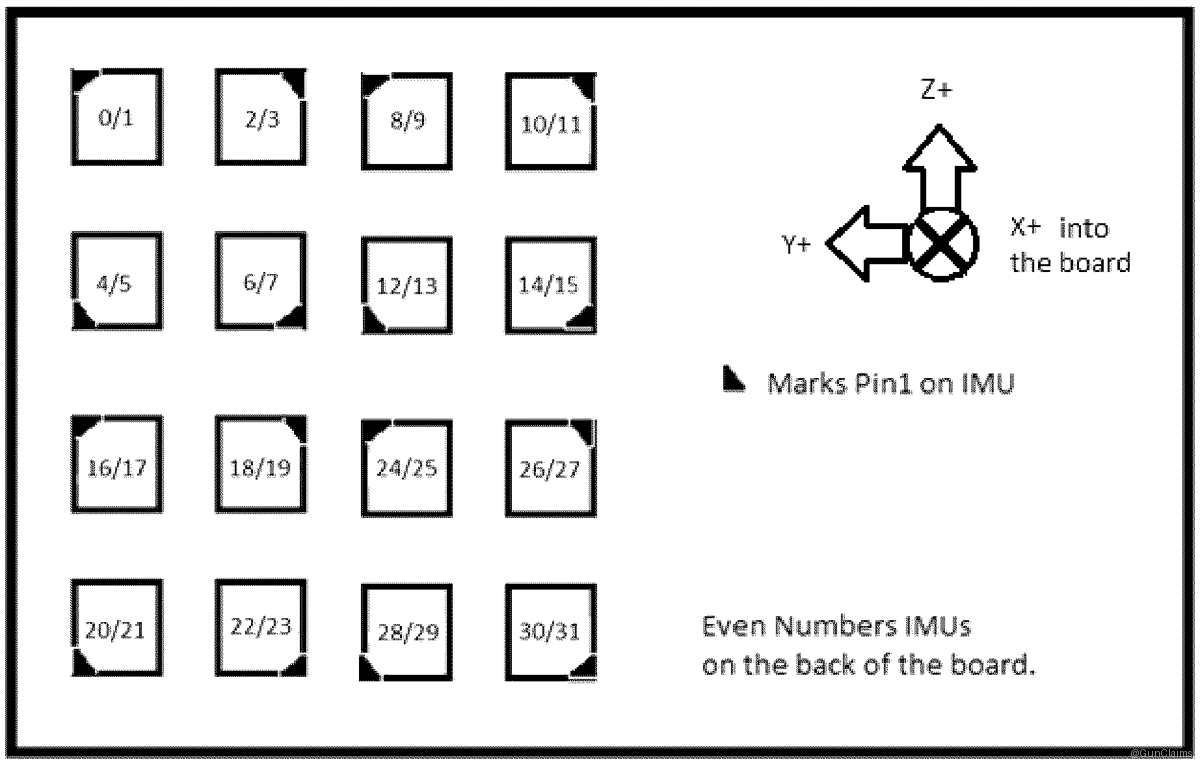
1 . A projectile or vehicle with a guidance measurement and control system comprising: at least one electronics board mounted interiorly to the projectile or vehicle body, the electronics board comprising an upper surface, a lower surface and a plurality of inertial measurement units (IMUs) mounted on at least one of the surfaces, each IMU having a signal and comprising at least one three-axis accelerometer and/or at least one three-axis gyroscope, the IMUs adapted to be interconnected at least via firmware; at least one processor adapted to receive the signal from each IMU; a guidance algorithm comprised in the processor, the guidance algorithm adapted to: 1. Synchronize the signals from each of the IMUs, 2. Calculate a bias and a drift in the signal of each IMU, 3. Correct the sensor signals, or apply a correction factor to the sensor signals, based on the calculated bias and drift, and 4. Provide a guidance metric representative of an absolute or relative location of the projectile or vehicle based on the signals and/or corrected signals of each of the IMUs; a handshake algorithm comprised in the processor, the handshake algorithm adapted to select one or more of the plurality of IMUs based on the projectile’s or vehicles spin rate or acceleration; and an actuator adapted to adjust a control system to adjust a course of the projectile or vehicle based at least in part on the guidance metric. at least one electronics board mounted interiorly to the projectile or vehicle body, the electronics board comprising an upper surface, a lower surface and a plurality of inertial measurement units (IMUs) mounted on at least one of the surfaces, each IMU having a signal and comprising at least one three-axis accelerometer and/or at least one three-axis gyroscope, the IMUs adapted to be interconnected at least via firmware; at least one processor adapted to receive the signal from each IMU; a guidance algorithm comprised in the processor, the guidance algorithm adapted to: 1. Synchronize the signals from each of the IMUs, 2. Calculate a bias and a drift in the signal of each IMU, 3. Correct the sensor signals, or apply a correction factor to the sensor signals, based on the calculated bias and drift, and 4. Provide a guidance metric representative of an absolute or relative location of the projectile or vehicle based on the signals and/or corrected signals of each of the IMUs; 1. Synchronize the signals from each of the IMUs, 2. Calculate a bias and a drift in the signal of each IMU, 3. Correct the sensor signals, or apply a correction factor to the sensor signals, based on the calculated bias and drift, and 4. Provide a guidance metric representative of an absolute or relative location of the projectile or vehicle based on the signals and/or corrected signals of each of the IMUs; a handshake algorithm comprised in the processor, the handshake algorithm adapted to select one or more of the plurality of IMUs based on the projectile’s or vehicles spin rate or acceleration; and an actuator adapted to adjust a control system to adjust a course of the projectile or vehicle based at least in part on the guidance metric.
Google Patents
https://patents.google.com/patent/US12578193
USPTO PDF
https://image-ppubs.uspto.gov/dirsearch-public/print/downloadPdf/12578193